

The Detection System of Helipad for Unmanned Aerial Vehicle Landing Using YOLO Algorithm
Abstract
Keywords
Full Text:
PDFReferences
B. Y. Suprapto, M. A. Heryanto, H. Suprijono, J. Muliadi, and B. Kusumoputro, “Design and development of heavy-lift hexacopter for heavy payload,†in Proceedings - 2017 International Seminar on Application for Technology of Information and Communication: Empowering Technology for a Better Human Life, iSemantic 2017, 2017, vol. 2018-Janua. https://doi.org/10.1109/ISEMANTIC.2017.8251877
S. D’Oleire-Oltmanns, I. Marzolff, K. D. Peter, and J. B. Ries, “Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco,†Remote Sens., vol. 4, no. 11, pp. 3390–3416, 2012. https://doi.org/10.3390/rs4113390
G. Belloni, M. Feroli, A. Ficola, S. Pagnottelli, and P. Valigi, “A mini UAV for security environmental monitoring and surveillance: Telemetry data analysis,†in Workshop Proceedings of SIMPAR 2008, 2008, pp. 426–433. http://www.dei.unipd.it/~emg/downloads/SIMPAR08-WorkshopProceedings/MiniAndMicroUAV/Belloni.pdf
B. Y. Suprapto, M. A. Heryanto, H. Suprijono, and B. Kusumoputro, “Altitude control of heavy-lift hexacopter using direct inverse control based on elman recurrent neural network,†in ACM International Conference Proceeding Series, 2017, vol. Part F1280. https://doi.org/10.1145/3036331.3036354
H. Mulyawan, “Identifikasi dan Tracking Objek Berbasis Image Processing secara Real Time,†EEPIS Final Proj., 2011. https://core.ac.uk/download/pdf/12344478.pdf
R. O. Prakash and C. Saravanan, “Autonomous robust helipad detection algorithm using computer vision,†in 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), 2016, pp. 2599–2604. https://doi.org/10.1109/ICEEOT.2016.7755163
A. Cesetti, E. Frontoni, A. Mancini, P. Zingaretti, and S. Longhi, “Vision-based autonomous navigation and landing of an unmanned aerial vehicle using natural landmarks,†in 2009 17th Mediterranean Conference on Control and Automation, 2009, pp. 910–915. https://doi.org/10.1109/MED.2009.5164661
G. F. Nsogo, K. Kith, B. J. Van Wyk, and M. A. Van Wyk, “Robust helipad detection algorithm (January 2007),†in AFRICON 2007, 2007, pp. 1–7. https://doi.org/10.1109/AFRCON.2007.4401634
S. Lee, J. Jang, and K.-R. Baek, “Implementation of vision-based real time helipad detection system,†in 2012 12th International Conference on Control, Automation and Systems, 2012, pp. 191–194. https://ieeexplore.ieee.org/document/6393429
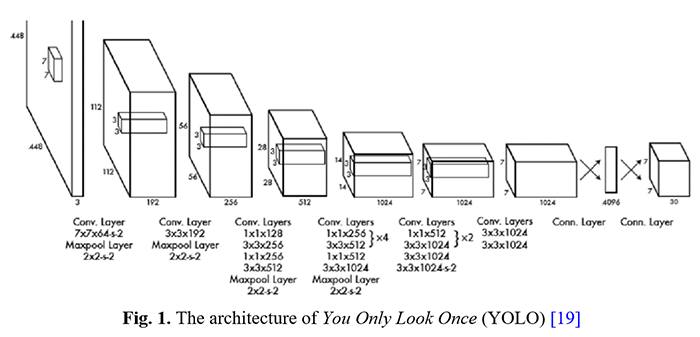
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,†in Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 779–788. https://doi.org/10.1109/CVPR.2016.91
S. Hossain and D. Lee, “Deep learning-based real-time multiple-object detection and tracking from aerial imagery via a flying robot with GPU-based embedded devices,†Sensors, vol. 19, no. 15, p. 3371, 2019. https://doi.org/10.3390/s19153371
N. Q. Truong, P. H. Nguyen, S. H. Nam, and K. R. Park, “Deep learning-based super-resolution reconstruction and marker detection for drone landing,†IEEE Access, vol. 7, pp. 61639–61655, 2019. https://doi.org/10.1109/ACCESS.2019.2915944
L. Yu et al., “Deep learning for vision-based micro aerial vehicle autonomous landing,†Int. J. Micro Air Veh., vol. 10, no. 2, pp. 171–185, 2018. https://doi.org/10.1177/1756829318757470
J. Chen, X. Miao, H. Jiang, J. Chen, and X. Liu, “Identification of autonomous landing sign for unmanned aerial vehicle based on faster regions with convolutional neural network,†in 2017 Chinese Automation Congress (CAC), 2017, pp. 2109–2114. https://doi.org/10.1109/CAC.2017.8243120
J. Wang, D. McKiver, S. Pandit, A. F. Abdelzaher, J. Washington, and W. Chen, “Precision UAV Landing Control Based on Visual Detection,†in 2020 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), 2020, pp. 205–208. https://doi.org/10.1109/MIPR49039.2020.00049
J. Li, X. Wang, H. Cui, and Z. Ma, “Research on Detection Technology of Autonomous Landing Based on Airborne Vision,†in IOP Conference Series: Earth and Environmental Science, 2020, vol. 440, no. 4, p. 42093. https://doi.org/10.1088/1755-1315/440/4/042093
C. Patruno, M. Nitti, E. Stella, and T. D’Orazio, “Helipad detection for accurate UAV pose estimation by means of a visual sensor,†Int. J. Adv. Robot. Syst., vol. 14, no. 5, p. 1729881417731083, 2017. https://doi.org/10.1177/1729881417731083
W. Kong, D. Zhang, X. Wang, Z. Xian, and J. Zhang, “Autonomous landing of an UAV with a ground-based actuated infrared stereo vision system,†in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, pp. 2963–2970. https://doi.org/10.1109/IROS.2013.6696776
R. Girshick, J. Donahue, T. Darrell, and J. Malik, “Region-based convolutional networks for accurate object detection and segmentation,†IEEE Trans. Pattern Anal. Mach. Intell., vol. 38, no. 1, pp. 142–158, 2015. https://doi.org/10.1109/TPAMI.2015.2437384
DOI: http://dx.doi.org/10.26555/jiteki.v7i2.20684
Refbacks
- There are currently no refbacks.
Copyright (c) 2021 Bhakti Yudho Suprapto, Suci Dwijayanti

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
| About the Journal | Journal Policies | Author | Information |
Organized by Electrical Engineering Department - Universitas Ahmad Dahlan
Published by Universitas Ahmad Dahlan
Website: http://journal.uad.ac.id/index.php/jiteki
Email 1: jiteki@ee.uad.ac.id